NSF NRI
NRI: Addressing Safe Interaction Between Autonomous and Human-driven Vehicles
Principal Investigator (PI):
Prof. Andreas Malikopoulos, Cornell University


Project Description
Connected and automated vehicles are robotic systems which exhibit significant levels of computational capability and physical complexity. They have the capacity to make contextually decisions independently, without human intervention, while they interact in a complex environment. The data and shared information through vehicle-to-everything communication are associated with significant technical challenges and gives rise to a new level of complexity in modeling and control. It is expected that connected and automated vehicles will gradually penetrate the market, interact with human-driven vehicles, and contend with vehicle-to-everything communication limitations, e.g., bandwidth, dropouts, errors, and delays. However, different penetration rates of connected and automated vehicles can significantly alter transportation efficiency and safety. This grant will synergistically integrate human-driving behavior with control theory and learning in developing data-driven approaches that will enable a transformative new functionality of connected and automated vehicles to interact with human-driven vehicles safely and efficiently. On the education front and outreach, the proposed research is an excellent catalyst for motivating interest in science, technology, engineering, and mathematics disciplines.
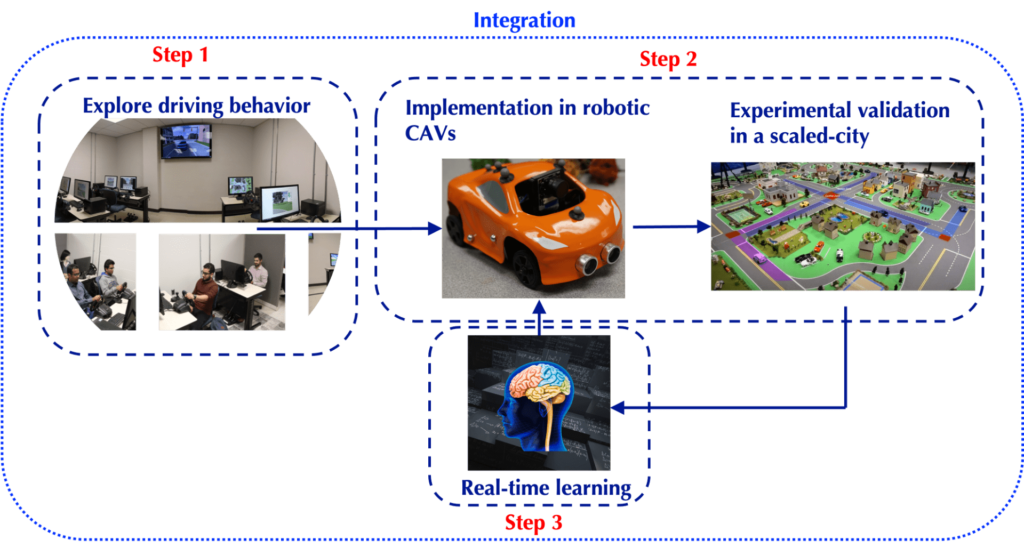
The outcome of this research will deliver new methods to address a fundamental gap between optimal trajectory planning of and safe-critical control in connected and automated vehicles. The proposed framework is organized at the intersection of three interdependent dimensions, namely, human-driving behavior, control theory, and learning. The human-driving dimension will enhance our understanding on how human drivers will respond to different driving scenarios. The control theory dimension will create knowledge on the appropriate prescription functions that will yield the optimal decisions and planning of connected and automated vehicles with respect to human driving behavior. The learning dimension will create knowledge of how connected and automated vehicles can learn to adapt their decisions and planning in situations where they encounter different behavior from what they already know about human driving. Thus, this dimension will not only improve the robustness of connected and automated vehicles but also their operation range with respect to any different driving behavior that they might encounter. The expected outcome of this research will aim at making connected and automated vehicles to coordinate with human-driven vehicles to improve safety and reduce pollution, energy consumption, and travel delays.